| 专利名称 | 机器人控制装置、机器人、机器人控制方法及存储介质 | ||
|---|---|---|---|
| 申请号/专利号 | 专利权人(第一权利人) | 延边大学|哈尔滨工业大学深圳研究生院 | |
| 申请日 | 2020-11-23 | 授权日 | 2023-02-17 |
| 专利类别 | 战略新兴产业分类 | 新一代信息技术 | |
| 技术主题 | 工业设备|机械设计|机械制造|帮助人走动的器具|自动化设备|发明专利|机械工程 | ||
| 应用领域 | |||
| 意向价格 | 具体面议 | ||
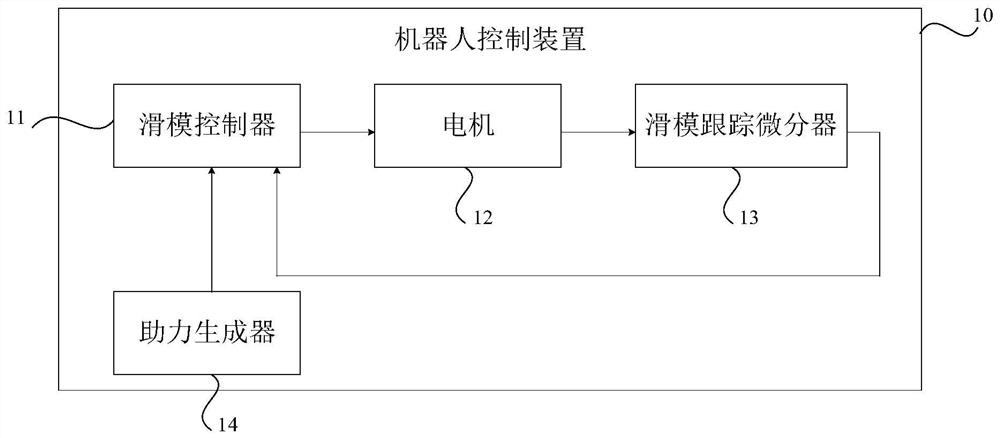
| 专利概述 | 本申请涉及一种机器人控制装置、机器人、机器人控制方法及存储介质,所述装置包括:滑模控制器、电机、滑模跟踪微分器和助力生成器,滑模控制器的输出端与电机的输入端连接,电机的输出端与滑模跟踪微分器的输入端连接,滑模跟踪微分器的输出端与助力生成器的输出端均与滑模控制器的输入端连接;滑模跟踪微分器,用于对电机输出的实际助力值进行去噪处理,得到去噪后的助力值,并将去噪后的助力值传输给滑模控制器;滑模控制器,用于根据去噪后的助力值和助力生成器得到的目标助力值之间的误差值,调整电机输出的实际助力值。本申请实施例提供的技术方案可以步行助力机器人与穿戴者的协调性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 孟爽 | 联系电话 | 18088660757 |