| 专利名称 | 一种减少车辆超参数调整的深度强化学习方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411023989.8 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-07-29 | 授权日 | 2024-12-06 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 新一代信息技术 |
| 技术主题 | 奖励学习|超参数|学习架构|维修车辆|逆强化学习|非线性|仿真|决策控制 | ||
| 应用领域 | 资源分配|内燃活塞发动机|人造生命|物理实现|神经学习方法 | ||
| 意向价格 | 具体面议 | ||
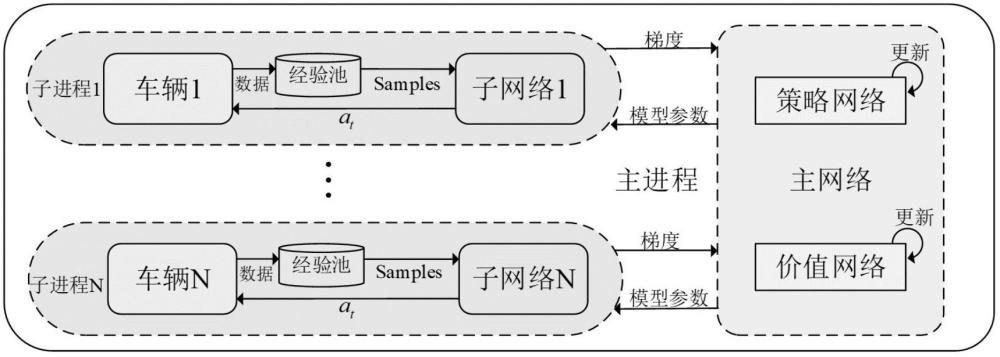
| 专利概述 | 一种减少车辆超参数调整的深度强化学习方法,涉及基于深度强化学习的自动驾驶车辆减少超参数调整的技术领域。提出了深度逆强化学习的车辆操纵稳定性非线性奖励学习架构,并进一步提出了高速公路场景下自车非线性操纵稳定性奖励与行驶规则奖励的自动驾驶集成决控策略,大大减少了在集成决控策略训练过程中对车辆操稳奖励函数的超参数设置。本发明的步骤是:获取深度逆强化学习训练所需的专家策略;使用深度逆强化学习获取车辆操纵稳定性奖励;使用多进程异步方法加速深度逆强化学习训练速度;高速复杂场景中的车辆集成决控。本发明能够在不依赖车辆大量的稳定性超参数设置的基础上,实现在高速场景中具有车辆稳定性保持能力的集成决控。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟转让 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |