| 专利名称 | 一种考虑多目标的车辆自适应巡航控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201610351859.6 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2016-05-25 | 授权日 | 2018-06-26 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 双五星 |
| 技术主题 | 动态模型|递归方法|巡航控制|车头时距|节流阀|控制算法|多目标|模型预测控制|车辆驾驶|车辆控制|模型预测|运动学模型|加速度 | ||
| 应用领域 | 外部条件输入参数|外部条件输出参数 | ||
| 意向价格 | 具体面议 | ||
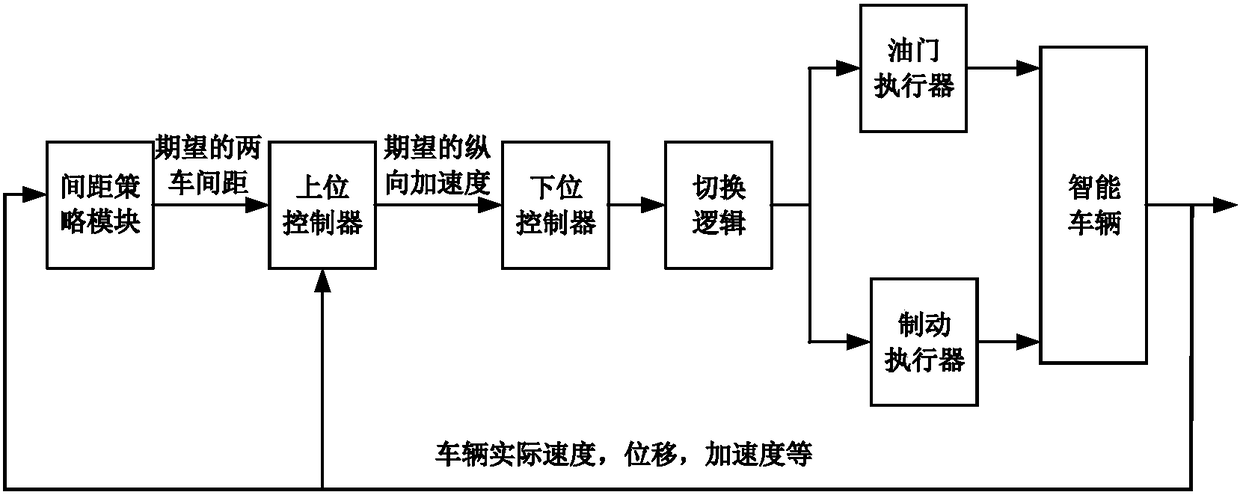
| 专利概述 | 本发明公开了一种考虑多目标的车辆自适应巡航控制方法,采用分层控制策略:上层控制根据目标车辆以及被控车辆当前的状态,决策出期望的纵向加速度,下层控制通过逆推的方法实现对期望纵向加速度的跟踪,包括以下步骤:建立两车相互纵向运动学模型;设计模型预测控制器,根据恒定车头时距策略获得期望的两车间距,利用模型预测控制算法决策出跟踪该期望车间距所需要的期望纵向加速度;将车辆控制工况分为驱动工况和制动工况,对两种工况分别根据车辆行驶方程建立车辆逆纵向动力学模型;根据车辆逆纵向动力学模型,在驱动工况下按照期望加速度求得期望的节气门开度,在制动工况下按照期望的加速度求得期望的制动踏板开度。 | ||
| 图片资料 |
|
||
| 合作方式 | 面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |