| 专利名称 | 一种基于局部点对特征的物体三维点云配准算法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111069102.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-09-13 | 授权日 | 2023-05-12 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 点云|功能描述|基于对象|特征矩阵|点对|算法|特征匹配 | ||
| 应用领域 | 图像数据处理 | ||
| 意向价格 | 具体面议 | ||
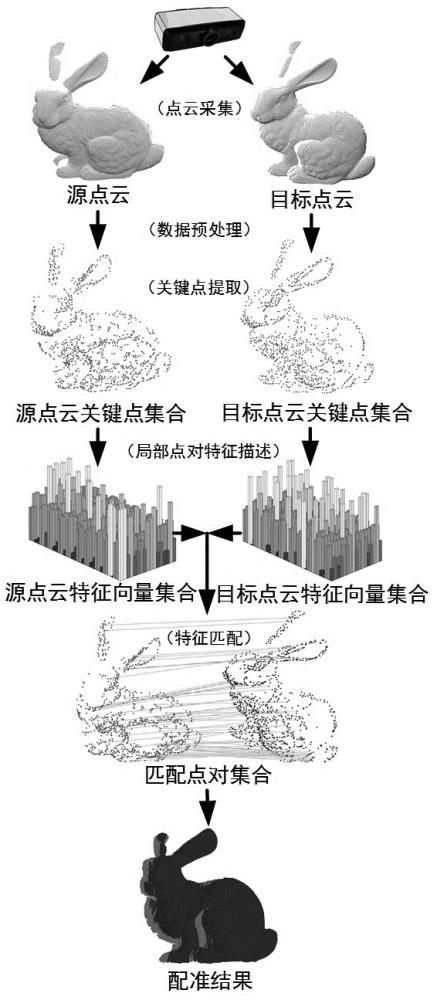
| 专利概述 | 本发明公开了一种基于局部点对特征的物体三维点云配准算法,具体按照以下步骤实施:步骤1,通过深度相机获取物体多个不同角度的三维点云数据;步骤2,对步骤1得到的点云数据进行预处理;步骤3,对步骤2得到的点云进行关键点提取,得到物体表面较为突出或凹陷的点集;步骤4,利用局部点对特征对步骤3得到关键点集进行特征描述,获得特征描述矩阵;步骤5,对步骤4得到的特征矩阵进行特征匹配,利用匹配到的点对关系计算旋转平移矩阵;步骤6,利用步骤5得到的旋转平移矩阵将物体的多个不同角度的点云旋转平移至同一坐标系下,完成配准。这种基于局部点对特征的物体三维点云配准算法具有鲁棒性强、配准精度高和运行速度快的优点。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟转让 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |