| 专利名称 | 一种轮足混合行走机器人结构及控制系统 | ||
|---|---|---|---|
| 申请号/专利号 | CN202011276655.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2020-11-16 | 授权日 | 2023-03-31 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 控制系统|腿式机器人|驱动轮|仿真|六自由度 | ||
| 应用领域 | 机动车 | ||
| 意向价格 | 具体面议 | ||
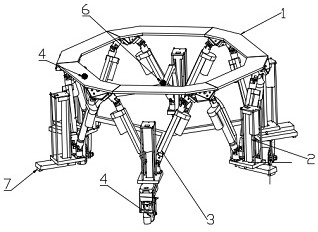
| 专利概述 | 本发明提供一种轮足混合行走机器人结构及控制系统,采用了六自由度并联腿与辅助腿结构、联结于腿上的驱动轮结合,结合了足式机器人可以在复杂地形能完成大负荷,高强度的作业(如搬运等),轮式机器人在平滑路径也能高效实时响应的优点,能在各种地形下完成轮式直行、转弯、横移等动作,既体现最基本的步行运动、自由度较少的特点,又增强了在结构化、非结构化环境中行走的能力。 | ||
| 图片资料 |
|
||
| 合作方式 | 拟转让 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |